文章目录
若您关注过 Apache Iceberg 的最新进展,可能已听闻其引入了类似 Delta Lake 的 Deletion Vector(DV),并在读时合并(MoR)表中弃用定位删除(positional deletes)。
Apache Iceberg 格式规范版本 3(format spec 3)对 MoR 表的行级删除处理机制进行了重大调整。在 Iceberg 格式规范版本 2(format spec 2)中,MoR 支持两类删除操作:
- Positional Deletes
- Equality Deletes
在 Iceberg V2 中,多数查询引擎通过 Positional Delete files 标记待删除的特定行位置。而 V3 版本弃用了这类定位删除文件,改用删除向量(deletion vectors)替代。
此变更源于定位删除在实际扩展性中暴露的缺陷,新版删除向量方案旨在解决这些问题。
使用 Iceberg V2 时,我发现定位删除是管理 Iceberg 等开放表格式中删除操作的有效方式。Apache Spark、Trino 等主流查询引擎在写入时均强力支持定位删除。相比之下,Apache Flink 则支持等值删除。
得知 MoR 表将引入删除向量(DV)并逐步弃用定位删除的消息后,身为数据工程师的我产生了深入探究的兴趣。毕竟定位删除与等值删除以往表现相当出色。
让我们共同深度解析这项公告,透彻理解其内涵。
我们将从基础概念切入。我已规划系列博客文章深入探讨此主题。但通过本篇,您将掌握 Apache Iceberg 的以下核心要点:
- 什么是写时复制(COW)和读时合并(MOR)?如何配置?
- MoR 中的删除类型:定位删除与等值删除
- Iceberg V2 中定位删除如何运作?
- 定位删除中分区级与文件级删除的权衡?
- 定位删除的缺陷及 V3 弃用原因
- 删除向量的引入如何优化删除机制?
提升 Apache Iceberg 读写性能的关键在于行级更新的管理策略。Iceberg 表可通过配置写时复制(CoW)或读时合并(MoR)两种策略处理行级更新。
理解这些策略的内部机制,有助于您在 Iceberg 表设计初期准确定义策略,确保表长期保持高性能。
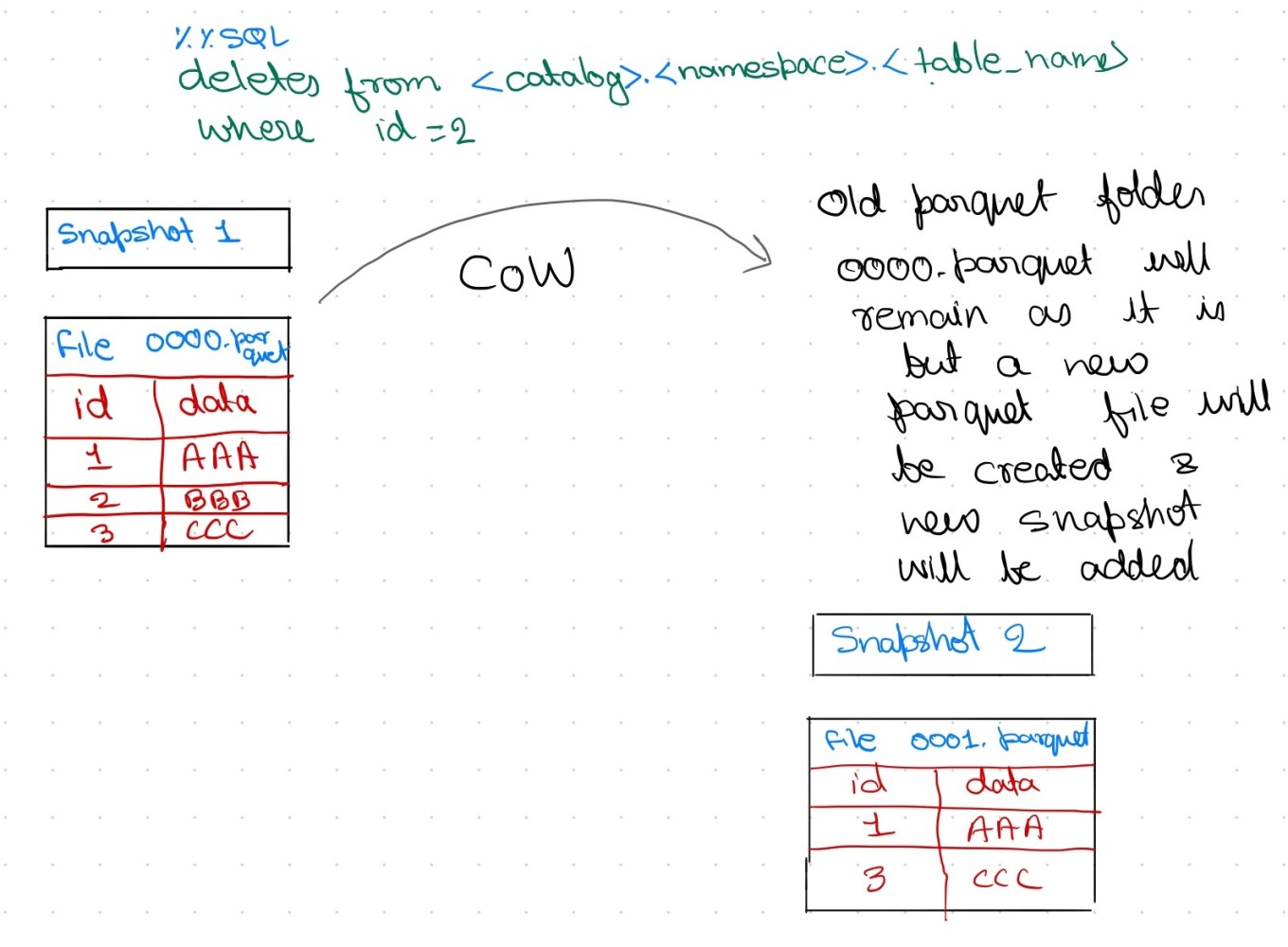
写时复制(Copy-on-Write)
- 此模式下,当 Apache Iceberg 表发生更新或删除时,相关数据文件会被复制并修改。
- 系统将创建指向新数据文件的 Iceberg 表快照,此过程使整体写入速度变慢。
- 若存在冲突的并发写入,需重试操作,进一步增加写入耗时。
- 但读取数据时无需额外处理,查询直接获取最新版本数据。
- CoW 通常用于追求更快读取速度的场景,此时写入速度可稍慢。
如果想及时了解Spark、Hadoop或者HBase相关的文章,欢迎关注微信公众号:过往记忆大数据
如果想及时了解Spark、Hadoop或者HBase相关的文章,欢迎关注微信公众号:过往记忆大数据
读时合并(Merge-on-Read)
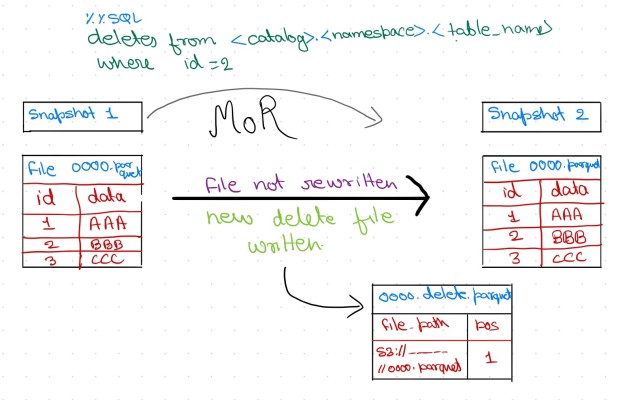
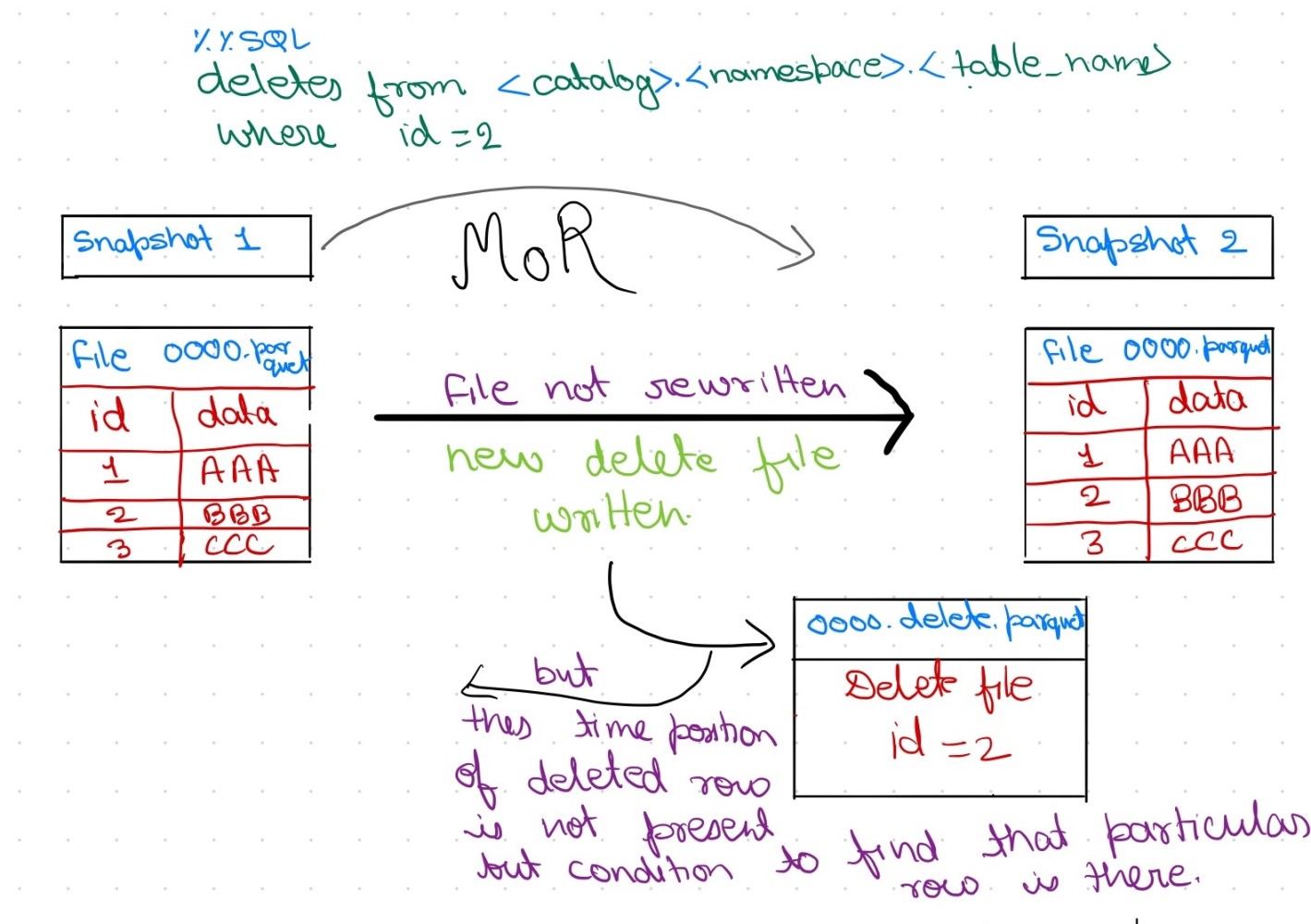
- 此模式下,当对 Iceberg 表执行更新或删除操作时,系统不会重写现有数据文件。删除操作会生成删除文件(delete files),而非重写整个数据文件。
- 在读取过程中,这些删除文件会即时应用,从而过滤掉过期记录。此方法虽能减少写入放大(write amplification),但因需额外处理可能降低读取性能。
- 作为 Apache Iceberg 的消费端,查询引擎需负责将删除文件(delete parquet files)与实际数据文件(actual parquet files)合并,以提供更新后的最新数据。
- 默认情况下,Iceberg 格式规范版本 2 的表以写时复制(CoW)模式组织。若需实现读时合并(MoR),必须为表设定特定属性。
spark.sql("""
CREATE TABLE demo.learn_iceberg.ankur_ice_3 (
id INT,
data STRING
) USING iceberg
TBLPROPERTIES (
'write.format.default' = 'parquet',
'write.delete.mode' = 'merge-on-read',
'write.update.mode' = 'merge-on-read',
'write.merge.mode' = 'merge-on-read',
'format-version' = '2'
)
""")
配置属性说明
- write.delete.mode:删除事务的处理方式
- write.update.mode:更新事务的处理方式
- write.merge.mode:合并事务的处理方式
需注意:这些属性仅为规范定义,其实际效果取决于所用查询引擎是否支持。若引擎未实现相关逻辑,可能导致非预期结果。在 MoR 模式下,所有操作均由查询引擎或消费端应用负责处理。
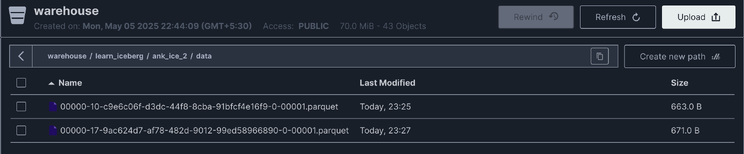
在我的 Apache Iceberg 表数据文件夹截图中,您会观察到存在两个 Parquet 文件:原始 Parquet 文件创建于上午 9:38。上午 9:39 执行 DELETE 命令后,生成了扩展名为 ...deletes.parquet 的删除 Parquet 文件。

如果想及时了解Spark、Hadoop或者HBase相关的文章,欢迎关注微信公众号:过往记忆大数据
相信您现已充分理解写时复制(CoW)与读时合并(MoR)。接下来我们将探讨 Apache Iceberg 的核心主题:定位删除(positional delete)与等值删除(equality delete),并解析为何 Iceberg v3 规范要用删除向量(Deletion Vectors)替代定位删除。
MoR 中的删除类型:定位删除与等值删除
删除文件用于追踪数据集中被逻辑删除的记录,查询引擎访问 Iceberg 表时需忽略这些记录。
根据记录删除信息的方式,删除文件分为两类:
定位删除文件(Positional Delete Files)
此类文件记录被删除记录在数据集中的精确位置。它们同时追踪:数据文件的文件路径(file path)以及 被删除记录在文件内的行位置(positions)
如果想及时了解Spark、Hadoop或者HBase相关的文章,欢迎关注微信公众号:过往记忆大数据
定位删除文件(Positional Delete Files)列出特定数据文件中应视为已删除的行位置。
读取时,查询引擎通过元数据和列信息(如file_path和行位置pos),将删除文件与数据文件动态合并,实时屏蔽已删除行。
虽然此方法避免了每次删除操作的高成本重写,但在大规模场景下存在设计与性能缺陷,后文将详细探讨。
在深入分析定位删除的限制前,我们先简要了解等值删除(Equality Deletes)。
等值删除文件(Equality Delete Files)
等值删除文件存储被删除记录的一个或多个列的值。这些列值基于执行删除操作时使用的条件存储。
如果想及时了解Spark、Hadoop或者HBase相关的文章,欢迎关注微信公众号:过往记忆大数据
当我初探删除文件时,最困惑的问题是:"在PySpark中处理行级更新时,如何选择或配置表使用定位删除或等值删除文件?"
实际上,Apache Spark当前写入Iceberg时不支持等值删除。据我调研,Apache Flink支持以等值删除形式写入删除文件。
现在您已了解两类删除文件,我们将继续解析定位删除被弃用的原因。
定位删除的运作机制(及其复杂性根源)
Iceberg中的定位删除文件通过数据文件内的行位置标记待删除行。此类文件的每条记录包含数据文件路径(data file path)、文件内的行序号(row ordinal)以及(可选)被删除行数据本身。
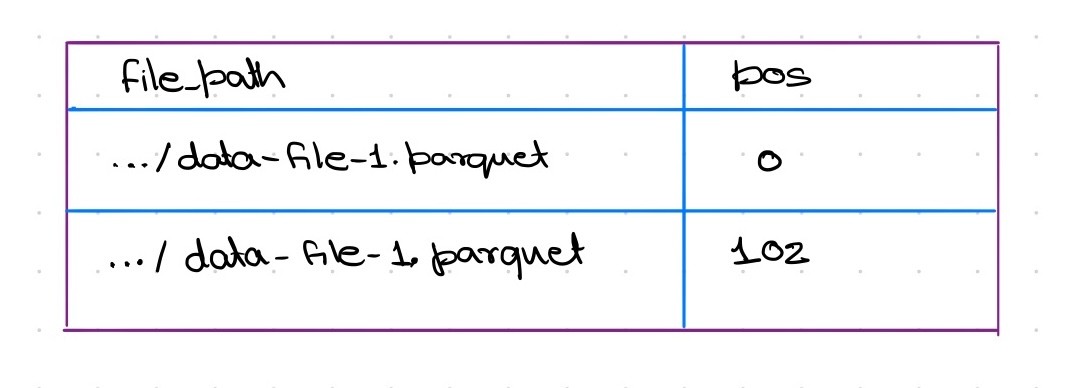
示例: 假设存在包含100行的数据文件data-file-1.parquet。若从MoR表中删除其中两行,Iceberg将生成小型删除文件,内容示例如下:
如果想及时了解Spark、Hadoop或者HBase相关的文章,欢迎关注微信公众号:过往记忆大数据
定位删除文件每行含义为“数据文件 data-file-1.parquet 中位置 X 的行已被删除”。
查询时,引擎将删除信息与实际 Parquet 文件动态合并:读取 data-file-1.parquet 时会跳过位置 0 和 102 的行,确保这些行不出现在查询结果中。
此合并过程需构建内存位图(in-memory bitmap),在读写环节将 Parquet 文件序列化为位图的成本极高。查询引擎虽通过动态合并避免每次删除的重写开销,但大规模场景中暴露显著的设计与性能缺陷。
首先需明确:Apache Iceberg 格式规范版本 2 初始采用分区范围删除文件(Partition-Scoped Delete Files),后转向文件范围删除文件(File-Scoped Delete Files)。
下文将解析两种策略的优劣并通过示例说明:
1. 分区级与文件级删除的权衡
分区范围删除文件:
同一分区的所有删除可归并至单一文件,减少磁盘文件数量,但单个文件会覆盖多个数据文件,导致读取目标数据文件时需扫描整个分区的删除条目。示例:分区 P1 含数据文件 A 和 B 时,读取文件 A 需加载包含 A/B 删除记录的合并文件,再丢弃 B 的无关条目,造成 I/O 和处理资源浪费。在本示例中,若需读取分区 P1 内的文件 A,查询仍须加载合并删除文件(该文件包含 A 和 B 的删除条目),随后再丢弃与 B 相关的无关条目。这将导致 I/O资源与处理能力的浪费——查询被迫获取实际不需要的数据文件删除信息,而这些操作仅是出于存储效率考量对删除条目进行的整合。
文件范围删除文件:
数据文件被删除行时,生成专属定位删除文件。读取目标明确:访问文件 A 时仅加载其删除文件(忽略 B)。代价是产生海量小文件,示例:删除 A 和 B 中各一行会生成两个独立小文件。大规模场景下,文件级删除将导致文件和元数据条目激增,需依赖主动的“删除文件压缩(delete file compaction)”控制文件数量。
当前 Iceberg 格式规范版本 2 支持两种策略,但均不理想:分区级删除减少文件数量,但增加读取开销;文件级删除降低读取开销,但引发文件数量爆炸。 用户常陷入两难:要么承受粗粒度删除文件的读取低效,要么应对海量细粒度删除文件导致的元数据膨胀和运维负担。设计上甚至允许同一数据文件关联多个删除文件(如多次独立删除操作后),加剧文件数量问题。
2. 查询执行期间的读 I/O 开销
使用定位删除的 MoR 表读取数据时,额外 I/O 和计算量随删除文件数量线性增长:
A. 数据文件的附加文件读取
查询任务需为每个数据文件打开并读取所有关联的定位删除文件。加载删除文件内容(通常以 Parquet/Avro/ORC 列表存储位置信息),构建内存中被删除行的位图。此后才能扫描过滤后的数据文件。Iceberg 文档明确指出,读取器必须 "开启所有匹配的删除文件并将其合并" 成删除位集(deletion bitset),然后才能扫描数据。这意味着,若某个数据分片(data split)涉及 5 个适用的独立删除文件(在多次删除且未压缩的场景中较为常见),读取器需执行 5 次额外文件读取操作,并在内存中合并五个列表/位图。
此类开销随每个任务处理的删除文件数量呈线性增长。
B. 无关数据读取
如前所述,若采用分区范围删除(partition-scoped deletes),单个删除文件可能覆盖多个数据文件。此时即使仅需扫描特定数据文件,读取器仍须加载该删除文件(其体积可能较大),即使仅极小部分条目与目标文件相关。无关条目最终将被丢弃,但获取与解析这些条目的工作已完成。这属于纯粹的开销——本质上读取了立即被抛弃的数据。例如:若分区删除文件为 50 MB,而扫描任务的目标数据文件仅关联其中 5 MB 内容,则 45 MB 的 I/O 与解析操作即被浪费。此低效性是分区级优化(减少磁盘文件数量)的代价——以加重读取负担换取存储效率。
C. 海量小文件开启
相反地,采用文件范围删除(file-scoped deletes)虽然避免了读取无关删除条目,但需承担开启大量小文件的成本。在分布式存储(如 HDFS、S3 等)上,每次文件开启操作都存在不可忽略的延迟和开销。实际上,内部基准测试表明:对于小文件而言,压缩删除数据与冗余删除数据之间的体积差异通常"低于单独开启文件的成本"。更直白的解释是:读取 N 个小删除文件可能比读取一个等体积的合并文件更慢,因为设置/寻址时间占主导地位。因此,大量小删除文件(常见于细粒度更新场景)会因每个文件的连接和读取设置成本,显著增加查询开销。
D. 运行时过滤成本
待删除信息加载后,将通过内存位图(Roaring Bitmap)过滤行记录。此步骤本身效率较高——Iceberg 的向量化读取器能以极低行均开销校验位图。
主要性能损耗发生于前置环节:开启、读取并实例化所有位图的过程。当删除量庞大时,准备删除位图的时间消耗可能非常显著。例如,若表中大量行已被删除(但未压缩),删除文件的总体积可能接近数据文件本身大小。极端场景下,读取50%行被删除的数据会使扫描负载翻倍(需读取100%数据文件 + 近50%体积的删除条目)。尽管每个单元处理高效,总I/O量仍远高于无删除的文件扫描。
影响总结: 每次定位删除(positional delete)都会引入额外的读取开销:需开启一个附加文件并处理位置信息列表。当删除量较小时此开销可忽略,但在大规模场景下(数十万或数百万条删除分散于多个文件中),其将成为关键制约因素。该方法实质上是将删除合并工作转嫁至查询时处理,导致高频更新表的查询I/O吞吐量下降与延迟增加。
3. 删除文件累积与维护负担
由于定位删除(position deletes)始终独立于数据存储,每次更新/删除操作均会使其累积。Iceberg 规范未要求写入时自动合并新旧删除文件。 这意味着若频繁执行删除或更新命令,表中将随时间推移堆积大量删除文件。
示例:若某分区每日删除少量行且不清理,30天后该分区将积累30个独立删除文件(全表范围内数量更甚)。Iceberg 依赖用户或外部进程定期压缩删除文件,即执行维护操作:
• 轻度压缩(Minor compaction):将多个小删除文件合并为单个大文件
• 深度压缩(Major compaction):通过重写数据将删除操作合并至数据文件(将相关部分从MoR转为写时复制)
若缺乏维护,性能将快速劣化—— 每个新增删除文件都会增加未来读写开销。实际案例表明:未经压缩的频繁更新表会因引擎处理不断增长的删除文件列表,导致查询显著变慢。
用户必须手动调用操作重写定位删除文件,若维护不足,读写性能劣化速度将超预期。换言之,稳定性能取决于持续监控(运行定期清理任务),这增加了操作复杂性。此设计存在缺陷:高效存储格式本应内部管理元数据增长。 依赖外部维护存在人为错误或延迟风险:一旦压缩任务中断,表将残留海量小删除文件,显著拖慢读取。
生产环境案例:
某按日期分区的PB级Iceberg表每日跨分区删除。由于每个分区的删除文件独立存储,数周后磁盘累积数千万个小删除文件。 即便采用分区范围删除优化单个分区的文件数量,巨量分区(每个至少一个删除文件)仍导致文件总数爆炸式增长。 此状况不仅加重元数据与存储系统负担(海量小对象导致文件系统开销),还使查询计划与执行日益迟缓。此类场景亟需主动压缩来合并/移除删除文件——本质上需与存储格式的固有特性对抗以维持性能。
4. 清单与元数据膨胀
每个定位删除文件(positional delete file)均被记录在 Iceberg 的清单文件(manifest files)元数据中。随着删除文件数量增加,清单会膨胀(即 "manifest bloat"),且在每次快照的元数据中追踪这些文件将加重负担。
比如 1000 个小删除文件可能向清单中添加 1000 个条目。这不仅会增大磁盘上的元数据文件体积,还意味着刷新表或规划查询时,Iceberg 规划器(catalog)需处理更多条目。
Trino 和 Spark 等工具需加载快照元数据,因此膨胀的清单会增加查询计划时间,甚至导致驱动节点/协调器(driver/coordinator)的内存占用上升。需注意:过多元数据文件(含删除文件)将加剧内存压力——因文件列表通常为性能优化而缓存及索引在内存中。
5. 悬空删除与重写问题
定位删除(Positional deletes)使数据文件重写复杂化。若数据文件被重写(例如因压缩或优化文件大小),理想情况下原文件关联的删除条目应同步失效。Iceberg 虽通过快照隔离(snapshot isolation)机制确保数据一致性(在重写提交前不会丢弃删除文件,直至旧快照过期),但实践中仍存在"悬空删除"(dangling deletes)问题——元数据中残留引用已不存在文件的删除条目。这需额外清理步骤(Iceberg 提供 rewrite_position_delete_files 过程处理:移除指向无效数据文件的删除条目并合并其余条目),显著增加操作复杂性。
总结而言,定位删除(positional deletes)虽能实现免整文件重写的行级删除,但引入了显著开销:额外文件、冗余元数据及运行时合并工作。这些成本随每次删除操作累积,使大规模增量删除的管理日益昂贵。通过上述案例与讨论,相信您已理解 Apache Iceberg MoR 表中使用定位删除的复杂性及固有缺陷。
接下来,我们将聚焦 Iceberg 格式规范版本 3(format-spec 3)引入的删除向量(Deletion Vector, DV)——该机制将逐步取代现有定位删除方案。
什么是删除向量(Iceberg v3的解决方案)?
删除向量(Deletion Vectors, DV)是 Iceberg 格式规范版本 3 中取代定位删除文件(positional delete files)的新机制。删除向量本质上是给定数据文件内被删除行位置的位图(bitmap)。不同于在独立文件中存储位置列表,DV 将相同信息记录为二进制位集(binary bitset):若某位为 "1"(或位图中该位存在),则对应行位置视为已删除。
删除向量的工作机制
每个存在删除记录的数据文件最多关联一个删除向量(deletion vector)。该向量映射该文件内应视为删除的行位置。例如:若 data-file-1.parquet 需删除行 0 和 102(如前述示例),其删除向量会将位(bits)0 和 102 置位(set),其余位(位置)保持未设置(unset)状态。
删除向量以二进制块(binary blobs)形式存储(采用基于 Roaring Bitmap 的压缩位图表示)。这些二进制块不作为独立文件存储于表数据路径,而是整合至特殊结构化文件(使用 Puffin 格式——Iceberg 的辅助二进制数据容器)。多个删除向量位图可打包至单个 Puffin 文件以提升效率。
表元数据(manifests)通过以下方式引用 Puffin 文件:
记录 Puffin 文件路径及每个位图的偏移量(offset)和长度(length)。换言之,清单(manifest)不再罗列多个小型删除文件,而是记录如:
“data-file-1.parquet 的删除向量位于 delete_vectors.puffin 偏移 X 处(长度 Y 字节)”。
由于每个数据文件仅允许关联一个删除向量,因此当该文件新增删除操作时,必须更新或替换现有向量(而非追加独立向量)。
实际操作中,新提交的删除操作会执行位图合并(UNION操作:将新删除位置与现有点阵合并),并写入新的组合删除向量。这确保始终仅存在单个连续位图表示该文件的所有删除记录。旧向量在新快照中将被废弃或取代。此设计彻底避免单文件多层删除信息堆叠——始终保持整合状态。
Iceberg 规范明确定义删除向量二进制块及其元数据格式。删除文件的清单条目现包含:file_path(指向 Puffin 文件)content_offset(偏移量)与 content_size(长度)——定位位图在文件内的位置。同时存储该向量归属的数据文件标识。本质上,清单直接将数据文件映射到其被删除行的特定位图。
删除向量的引入是经过深思熟虑的优化举措,旨在精简行级删除(row-level deletes)流程。
Iceberg 联合创始人 Ryan Blue 与 Anton Okolnychyi 阐释道:Iceberg 社区在设计 v3 版本时,与 Delta Lake 团队(已实现类似方案)协作完善此机制。我尤其欣赏 Anton 在今年 Apache Iceberg Summit 上对这些概念的透彻解析。
其核心目标是以更低开销实现免重写的行级删除。实际上,删除向量达成与定位删除(positional deletes)相同的逻辑结果——在读取时隐藏已删除行——但以更紧凑高效的方式存储信息。
本文翻译自:https://www.linkedin.com/pulse/why-iceberg-choosing-deperecate-positional-delete-mor-ankur-ranjan-fpjjc
本博客文章除特别声明,全部都是原创!原创文章版权归过往记忆大数据(过往记忆)所有,未经许可不得转载。
本文链接: 【为什么 Iceberg 社区选择遗弃 MoR 中的 positional delete?】(https://www.iteblog.com/archives/10246.html)